This file provides useful information on how to use the feather click shield
- Got to
File > Preferencesand enterhttps://adafruit.github.io/arduino-board-index/package_adafruit_index.jsoninto the Additional Boards Manager URLs. - Click
OK. - Install
Adafruit SAMD Boardsin the Boards Manager. - Click
Tools > Board > Adafruit SAMD Boardsand selecte theAdafruit Feather M4 CAN.
See https://learn.adafruit.com/adafruit-feather-m4-can-express/arduino-ide-setup for more information.
- Place your
Adafruit feather M4 CANin the center of theFeather click shield. - Place your
Click Boardsinto themikroBUSsockets. - Connect a USB-C cable into to your computer and directly to the
Feather M4 CAN(the upper USB-C port).
This section provides useful links, images and code snippets for every component and click board.
Pinout of the feather click shield:
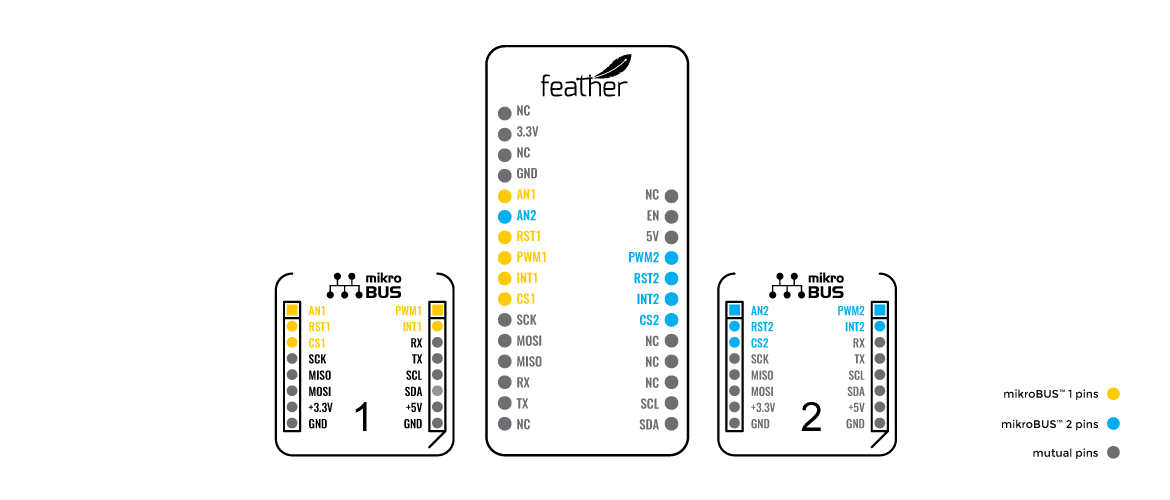
Pinout of the adafruit feather m4 can:
Component description: https://www.mikroe.com/touchpad-4-click
Controller datasheet: https://www.azoteq.com/images/stories/pdf/iqs7211a_datasheet.pdf
Code example (not perfect):
#include <Wire.h>
#define ADDR 0x56
#define INT_PIN 11 // for microBUS 1
// #define INT_PIN 18 // for microBUS 2
#define LEFT 0
#define RIGHT 1
#define DOWN 2
#define UP 3
#define SINGLE_TAP 4
#define PRESS_AND_HOLD 5
#define GESTURE_READ_FAILED 999
#define ADDR_INFO_FLAGS 0x10
#define ADDR_GESTURES 0x11
#define ADDR_FINGER_X 0x14
#define ADDR_FINGER_Y 0x15
#define ADDR_TOUCH_STRENGTH 0x16
#define ADDR_FINGER_AREA 0x17
volatile bool gestureRegistered = false;
int readRegister(int addr)
{
int data = 0;
Wire.beginTransmission(ADDR);
Wire.write(addr); // Gestures register
Wire.endTransmission(0);
// Read gestures
Wire.requestFrom(ADDR, 2);
if (Wire.available() >= 2) {
byte byte1 = Wire.read();
byte byte2 = Wire.read();
data = (byte2 << 8) | byte1;
}
return data;
}
int readGestures()
{
int data = readRegister(ADDR_GESTURES);
if (data & 1) return SINGLE_TAP;
if (data & 2) return PRESS_AND_HOLD;
if (data & 4) return RIGHT;
if (data & 8) return LEFT;
if (data & 16) return DOWN;
if (data & 32) return UP;
return GESTURE_READ_FAILED;
}
int readTouchStrength()
{
int data = readRegister(ADDR_TOUCH_STRENGTH);
return data;
}
int readFingerX()
{
int data = readRegister(ADDR_FINGER_X);
return data;
}
int readFingerY()
{
int data = readRegister(ADDR_FINGER_Y);
return data;
}
void ISR()
{
gestureRegistered = true;
}
void setup()
{
Serial.begin(9600);
pinMode(INT_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(INT_PIN), ISR, FALLING);
Wire.begin();
// Config
Wire.beginTransmission(ADDR);
Wire.write(0x51);
Wire.write(0x4710);
Wire.endTransmission();
}
void loop()
{
if (gestureRegistered)
{
int gesture = readGestures();
switch (gesture)
{
case LEFT:
Serial.println("Left");
break;
case RIGHT:
Serial.println("Right");
break;
case UP:
Serial.println("Up");
break;
case DOWN:
Serial.println("Down");
break;
case SINGLE_TAP:
Serial.println("Single tap");
break;
case PRESS_AND_HOLD:
Serial.println("Press and hold");
break;
default:
break;
}
gestureRegistered = false;
}
}Component description: https://www.mikroe.com/oled-c-click
Graphics driver datasheet: https://newhavendisplay.com/content/app_notes/SSD1351.pdf
Library: https://github.com/adafruit/Adafruit-SSD1351-library (Can be found in Library Manager. Search: Adafruit SSD1351)
NOTE: This library doesn't support the 96x96 OLED display. Everything will be offset. No better library was found.
Code example (draw different shapes):
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1351.h>
#include <SPI.h>
// Definitions for display offsets. Always set pixels only within this range, otherwise they will be off-screen. (This is because the available library doesn't support our resolution)
#define MIN_X 16
#define MIN_Y 0
#define MAX_X 111
#define MAX_Y 95
// Using Microbus 1
#define SCLK_PIN 25
#define MOSI_PIN 24
#define DC_PIN 17
#define CS_PIN 19
#define RST_PIN 16
#define EN_PIN 18
// // Using Microbus 2
// #define SCLK_PIN 25
// #define MOSI_PIN 24
// #define DC_PIN 13
// #define CS_PIN 10
// #define RST_PIN 12
// #define EN_PIN 11
// Color definitions
#define BLACK 0x0000
#define WHITE 0xFFFF
#define BLUE 0xF800
#define RED 0x001F
#define GREEN 0x07E0
#define YELLOW 0x07FA
#define PURPLE 0xF81F
Adafruit_SSD1351 tft = Adafruit_SSD1351(128, 128, CS_PIN, DC_PIN, MOSI_PIN, SCLK_PIN, RST_PIN);
void testOLED()
{
// Single pixels
tft.fillScreen(BLACK);
for(int i = MIN_X; i <= MAX_X; i++)
{
for (int j = MIN_Y; j <= MAX_Y; j++)
{
tft.drawPixel(i, j, WHITE);
delay(1);
}
}
tft.fillScreen(BLACK);
// line
tft.drawLine(MIN_X, MIN_Y, MAX_X, MAX_Y, WHITE);
delay(3000);
tft.fillScreen(BLACK);
// rectangle
tft.drawRect(50, 50, 20, 20, YELLOW);
delay(3000);
// fill it
tft.fillRect(50, 50, 20, 20, YELLOW);
delay(3000);
// circle
tft.drawCircle(40, 40, 15, BLUE);
delay(3000);
// fill it
tft.fillCircle(40, 40, 15, BLUE);
delay(3000);
tft.fillScreen(BLACK);
}
void setup(void) {
Serial.begin(9600);
// Set enable pin to high
pinMode(EN_PIN, OUTPUT);
digitalWrite(EN_PIN, HIGH);
tft.begin();
}
void loop() {
testOLED();
}Component description: https://www.mikroe.com/smart-mic-click
Acoustic processor datasheet: http://download.mikroe.com/documents/datasheets/IA611_datasheet.pdf
Component description: https://www.mikroe.com/thumbstick-click
Datasheet zum A/D-Converter: http://ww1.microchip.com/downloads/en/devicedoc/21298e.pdf
Thumbstick Layout:
Code example (read thumbstick and button input):
#include <SPI.h>
// For microBUS 1
#define CS_PIN 19
#define THUMBSTICK_BUTTON_PIN 18
// // For microBUS 2
// #define CS_PIN 10
// #define THUMBSTICK_BUTTON_PIN 11
#define DEBOUNCE_TIME_MS 10
volatile unsigned long lastButtonPress = 0;
int read_thumbstick(int channel) {
int value = 0;
// Select the MCP3204
digitalWrite(CS_PIN, LOW);
// Send the start bit, single-ended mode, and channel selection bits
byte command = B11000000 | (channel << 3);
SPI.transfer(command);
// Read the 12-bit result (MSB first)
value = SPI.transfer(0) & B00001111;
value = (value << 8) + SPI.transfer(0);
// Deselect the MCP3204
digitalWrite(CS_PIN, HIGH);
return value;
}
void get_user_input()
{
int dir = 0;
// Read value for both axes
int value_0 = read_thumbstick(0);
int value_1 = read_thumbstick(1);
int vert = 0;
int hor = 0;
// Use thresholds to convert input into (binary) directions
// This is not required but was used to counter noisy input.
if (value_0 > 3500) vert = -1;
else if (value_0 < 500) vert = 1;
else vert = 0;
if (value_1 > 3500) hor = 1;
else if (value_1 < 500) hor = -1;
else hor = 0;
Serial.print("User input: vert: ");
Serial.print(vert);
Serial.print(" hor: ");
Serial.print(hor);
Serial.println();
}
void onThumbstickPressed()
{
// Debouncing
unsigned long now = millis();
if ((now - lastButtonPress) < DEBOUNCE_TIME_MS) return;
Serial.println("Pressed thumbstick");
lastButtonPress = now;
}
void setup()
{
Serial.begin(9600);
SPI.begin();
pinMode(CS_PIN, OUTPUT);
pinMode(THUMBSTICK_BUTTON_PIN, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(THUMBSTICK_BUTTON_PIN), onThumbstickPressed, FALLING);
}
void loop()
{
get_user_input();
delay(100);
}Component description: https://www.mikroe.com/8800-retro-click
LED driver datasheet: https://ams.com/documents/20143/36005/AS1115_DS000206_1-00.pdf
Code example (flash the character '!' on and off):
#include <Wire.h>
byte characterOne[] = {0,0,0,1,1,0,0,0,
0,0,0,1,1,0,0,0,
0,0,0,1,1,0,0,0,
0,0,0,1,1,0,0,0,
0,0,0,1,1,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,1,1,0,0,0,
0,0,0,1,1,0,0,0};
byte characterTwo[] = {0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0};
byte i2c_addr = 0x00;
// Write to 8x8 LED matrix
void show(byte data[]) {
for (int x=0; x < 8; x++) {
byte line = 0;
for (int y=0;y < 8; y++) {
line = line << 1;
line = line | data[x*8+y];
}
Wire.beginTransmission(i2c_addr);
Wire.write(x+1); // select segment
Wire.write(line); // select digit
Wire.endTransmission();
}
}
void setup()
{
Serial.begin(9600);
// LED matrix
Wire.begin(); // join i2c bus (address optional for master)
// Wakeup from shutdown mode
Wire.beginTransmission(i2c_addr);
Wire.write(0x0c);
Wire.write(0x81);
Wire.endTransmission();
delay(1);
// This device can change slave address dynamically.
// see p.15 more detail
// Change device address (p.15)
Wire.beginTransmission(i2c_addr);
Wire.write(0x2d); // register
Wire.write(0x01); // user-defined (0x03 if not connected any pins)
Wire.endTransmission();
delay(1);
i2c_addr = 0x03; // address changed from here
// Intensity control (0x0A)
Wire.beginTransmission(i2c_addr);
Wire.write(0x0a); // register
//Wire.write(0x0f); // 15/16 (max)
Wire.write(0x07); // 8/16 (median)
//Wire.write(0x00); // 1/16 (min)
Wire.endTransmission();
delay(1);
// Scan-Limit Register (0x0B)
Wire.beginTransmission(i2c_addr);
Wire.write(0x0b);
Wire.write(0x07); // display all digits 0:7
Wire.endTransmission();
delay(1);
// Non-decode mode (0x09) for 8x8 dot matrix
Wire.beginTransmission(i2c_addr);
Wire.write(0x09);
Wire.write(0x00); // non-decode mode
Wire.endTransmission();
delay(1);
}
void loop()
{
show(characterOne);
delay(400);
show(characterTwo);
delay(400);
}Component description: https://www.mikroe.com/10x10-rgb-click
LED library (can be directly installed in ArduinoIDE or PlatformIO): https://github.com/adafruit/Adafruit_NeoPixel
Code example:
#include <Adafruit_NeoPixel.h>
#define PIN 17 // For microBUS 1
// #define PIN 13 // For microBUS 2
#define NUM_PIXELS 100
Adafruit_NeoPixel LEDs(NUM_PIXELS, PIN, NEO_GRB + NEO_KHZ800);
void setup() {
// Start LEDs
LEDs.begin();
// Clear all LEDs
LEDs.clear();
// Set brightness of all LEDs. [0, 255]
LEDs.setBrightness(40);
}
void loop() {
for(int i=0; i<NUM_PIXELS; i++) {
// Set color of individual LED
LEDs.setPixelColor(i, LEDs.Color(255-(2*i), 150, i*2));
// Write to hardware, else nothing would show
LEDs.show();
delay(20);
}
for(int i=0; i<NUM_PIXELS; i++) {
// Set color of individual LED
LEDs.setPixelColor(i, LEDs.Color(0, 0, 0));
// Write to hardware, else nothing would show
LEDs.show();
delay(20);
}
}Component description: https://www.mikroe.com/mpu-9dof-click
Datasheet: https://invensense.tdk.com/wp-content/uploads/2015/02/PS-MPU-9250A-01-v1.1.pdf
Library and examples: https://github.com/hideakitai/MPU9250
Code example (get roll, pitch and yaw):
#include "MPU9250.h"
MPU9250 mpu;
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.setup(0x68);
}
void loop() {
if (mpu.update()) {
print_roll_pitch_yaw();
}
}
void print_roll_pitch_yaw() {
Serial.print("Yaw, Pitch, Roll: ");
Serial.print(mpu.getYaw(), 2);
Serial.print(", ");
Serial.print(mpu.getPitch(), 2);
Serial.print(", ");
Serial.println(mpu.getRoll(), 2);
}Component description: https://www.mikroe.com/proximity-18-click
Datasheet: https://download.mikroe.com/documents/datasheets/VCNL3036X01_datasheet.pdf
Install library: https://github.com/JenertsA/VCNL3040_Proximity_Sensor_Library (Available in Library Manager of Arduino Ide. Search: VCNL3040) NOTE: Go to VCNL3040.h and change VCNL3040_DEV_ADDRESS from 0x60 to 0x41.
Code example (read proximity value):
#include <VCNL3040.h>
#include <Wire.h>
VCNL3040 sens;
void setup()
{
Serial.begin(9600);
Wire.begin();
sens.begin();
sens.startReading();
}
void loop()
{
unsigned int dist_raw = sens.readPSData();
Serial.println(dist_raw);
delay(100);
}Component description: https://www.mikroe.com/radar-click
Datasheet: https://download.mikroe.com/documents/datasheets/MM5D91-00_datasheet.pdf
Libraries for click boards by MIKROE (NOT compatible with our board but can be useful): https://github.com/MikroElektronika/mikrosdk_click_v2
Run this code snipped to get the i2c addresses of the connected devices:
#include <Wire.h>
void setup()
{
Wire.begin();
Serial.begin(9600);
while (!Serial); // Leonardo: wait for serial monitor
Serial.println("\nI2C Scanner");
}
void loop()
{
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for(address = 1; address < 127; address++ )
{
// The i2c_scanner uses the return value of
// the Write.endTransmisstion to see if
// a device did acknowledge to the address.
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0)
{
Serial.print("I2C device found at address 0x");
if (address<16)
Serial.print("0");
Serial.print(address,HEX);
Serial.println(" !");
nDevices++;
}
else if (error==4)
{
Serial.print("Unknown error at address 0x");
if (address<16)
Serial.print("0");
Serial.println(address,HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000); // wait 5 seconds for next scan
}