The modern Blackbox log analyzer for FPV pilots.
PID Piper helps you tune your drone with confidence. Drop in a .bbl or
.bfl log from Betaflight or INAV and get instant, interactive insights:
step response, filter performance, throttle spectrograms, and more — all
running locally on your machine.
Pick the right build for your machine on the Releases page:
| OS | Recommended file |
|---|---|
| macOS Apple Silicon | PID-Piper-x.x.x-mac-arm64.dmg |
| macOS Intel | PID-Piper-x.x.x-mac-x64.dmg |
| Windows x64 | PID-Piper-x.x.x-win-x64-setup.exe / PID-Piper-x.x.x-win-x64-setup.msi |
| Windows ARM64 | PID-Piper-x.x.x-win-arm64-setup.exe / PID-Piper-x.x.x-win-arm64-setup.msi |
| Linux x86_64 — Ubuntu/Debian | PID-Piper-x.x.x-linux-amd64.deb |
| Linux x86_64 — Fedora/RHEL | PID-Piper-x.x.x-linux-x86_64.rpm |
| Linux x86_64 — portable | PID-Piper-x.x.x-linux-x86_64.AppImage |
| Linux ARM64 — Ubuntu/Debian | PID-Piper-x.x.x-linux-arm64.deb |
| Linux ARM64 — Fedora/RHEL | PID-Piper-x.x.x-linux-aarch64.rpm |
| Linux ARM64 — portable | PID-Piper-x.x.x-linux-arm64.AppImage |
Heads-up: the app is currently unsigned. On Windows, click "More info" → "Run anyway" if SmartScreen warns you. On macOS Intel (
x64), right-click → Open the first time. On macOS Apple Silicon (arm64), the quarantine flag will cause the app to bounce forever. Run this in Terminal to fix it:xattr -cr "/Applications/PID Piper.app"
We publish three Linux formats:
- Ubuntu / Debian: prefer the
.deb. - Fedora / RHEL: prefer the
.rpm. - Portable fallback: use the AppImage.
⚠️ Ubuntu 24.04+ AppImage users: Ubuntu 24.04 restricts the AppImage sandbox via AppArmor. If the AppImage fails to launch, install the.debinstead.
Every release includes:
- GitHub build provenance / attestations, and
- Sigstore (cosign) signatures (
.sig+.pem) for each binary.
# Verify GitHub-native provenance attestations
gh attestation verify ./PID-Piper-<version>-<os>-<arch>.<ext> --owner ishumilin
# Verify cosign signature
cosign verify-blob \
--certificate ./PID-Piper-<version>-<os>-<arch>.<ext>.pem \
--signature ./PID-Piper-<version>-<os>-<arch>.<ext>.sig \
--certificate-identity-regexp "https://github.com/.*/pid-piper-source/.*" \
--certificate-oidc-issuer "https://token.actions.githubusercontent.com" \
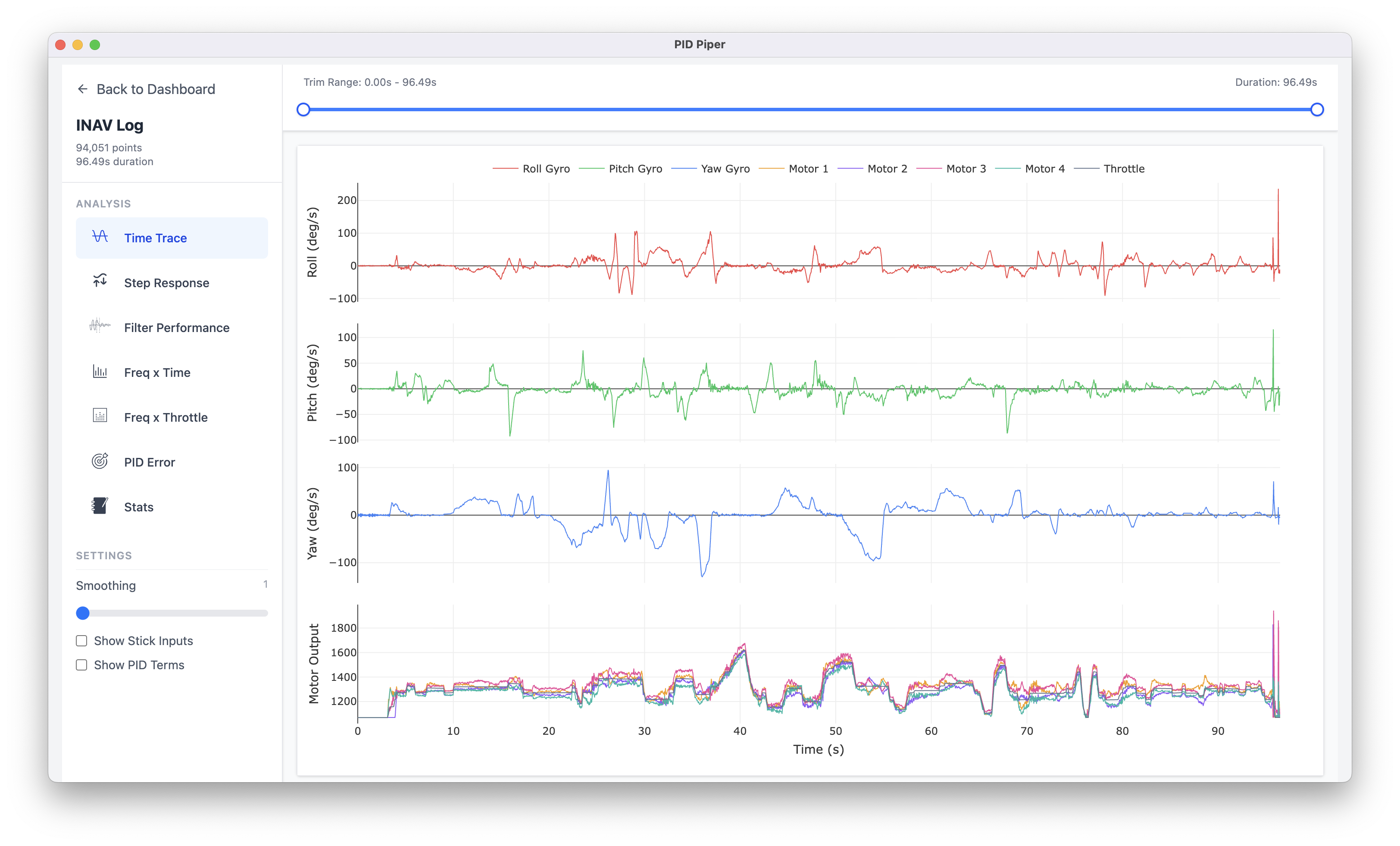
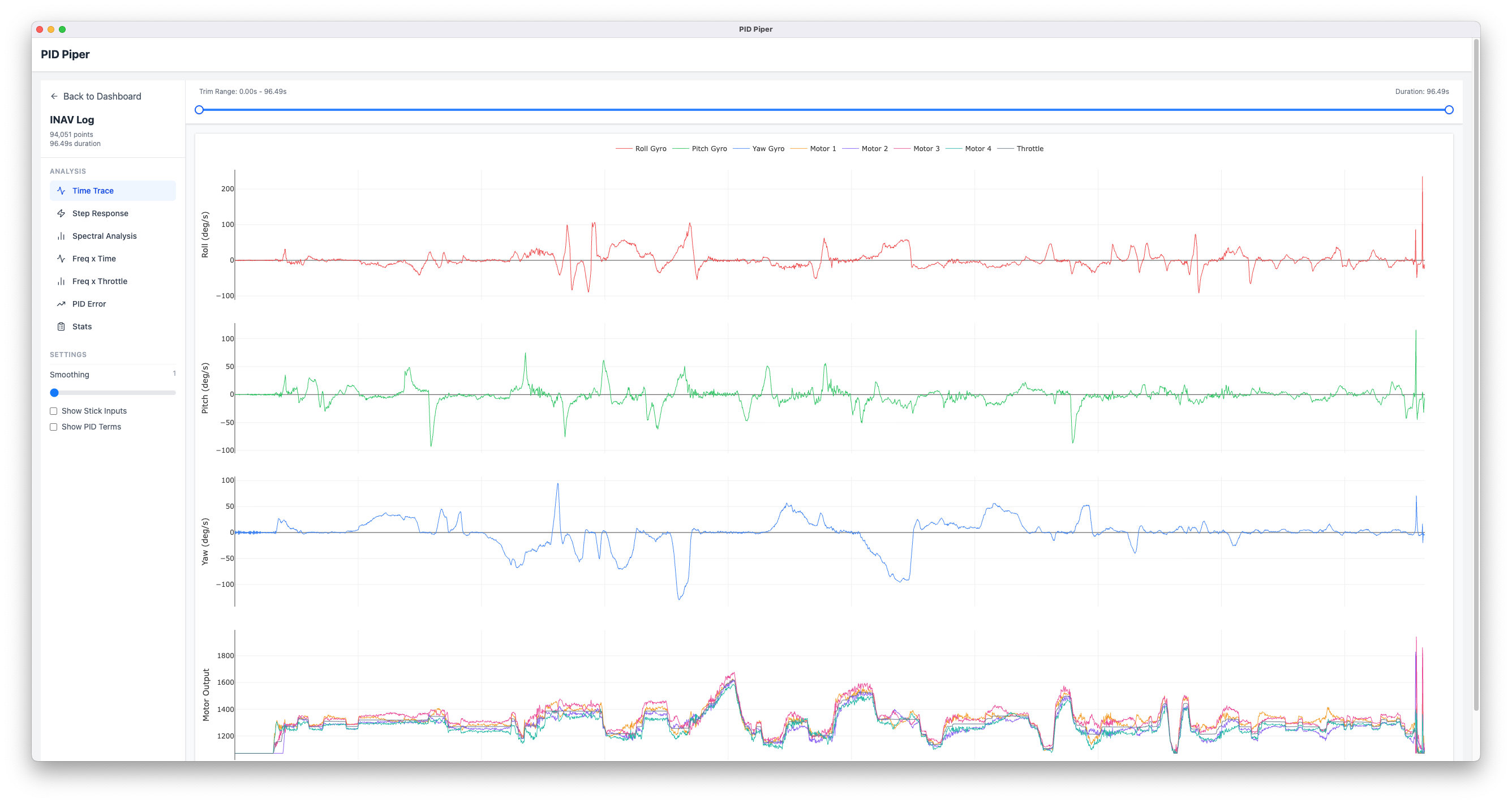
./PID-Piper-<version>-<os>-<arch>.<ext>Overlay gyro / setpoint / motor traces with optional PID terms.
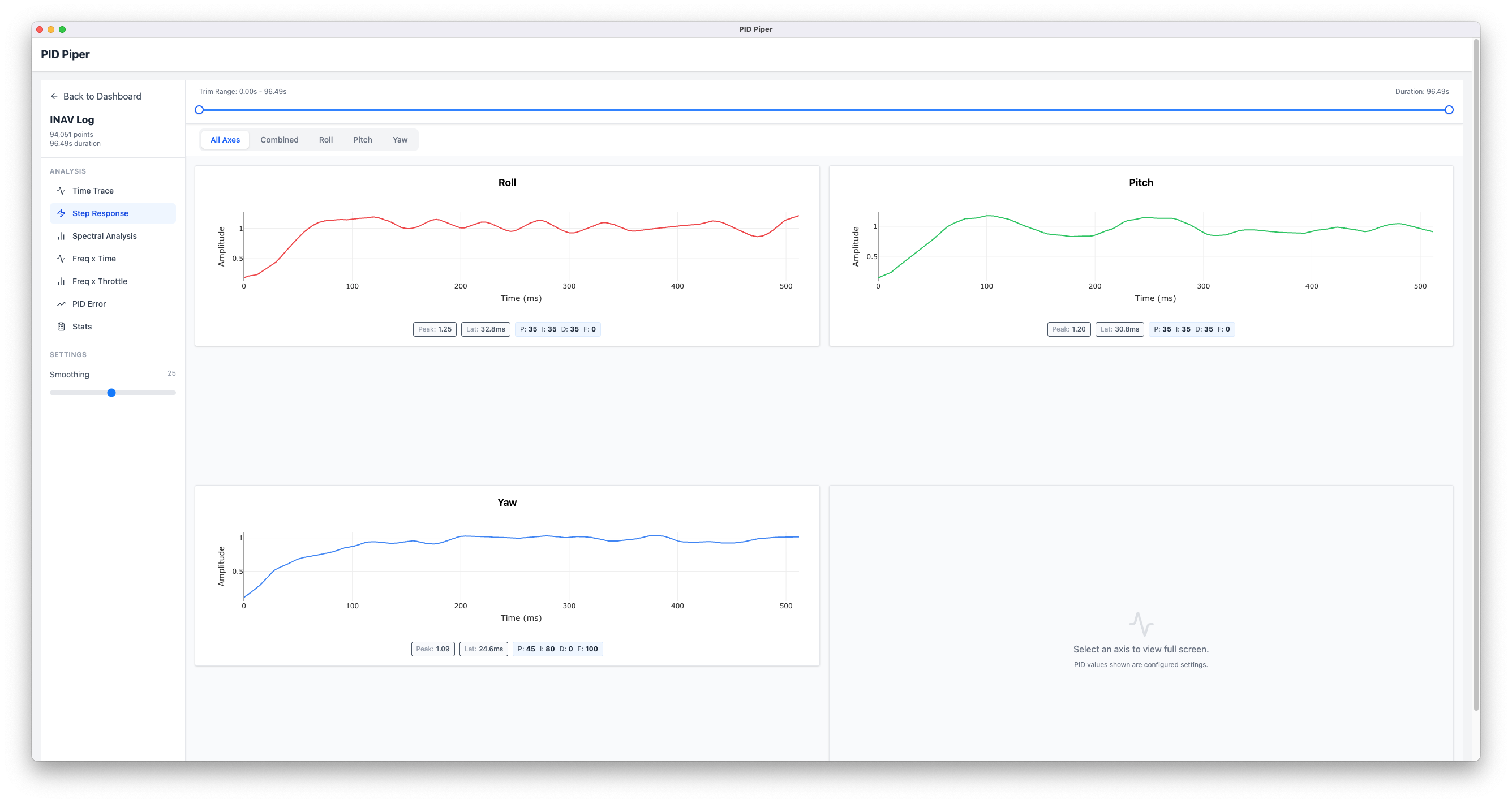
Measure exactly how your drone reacts to stick input.
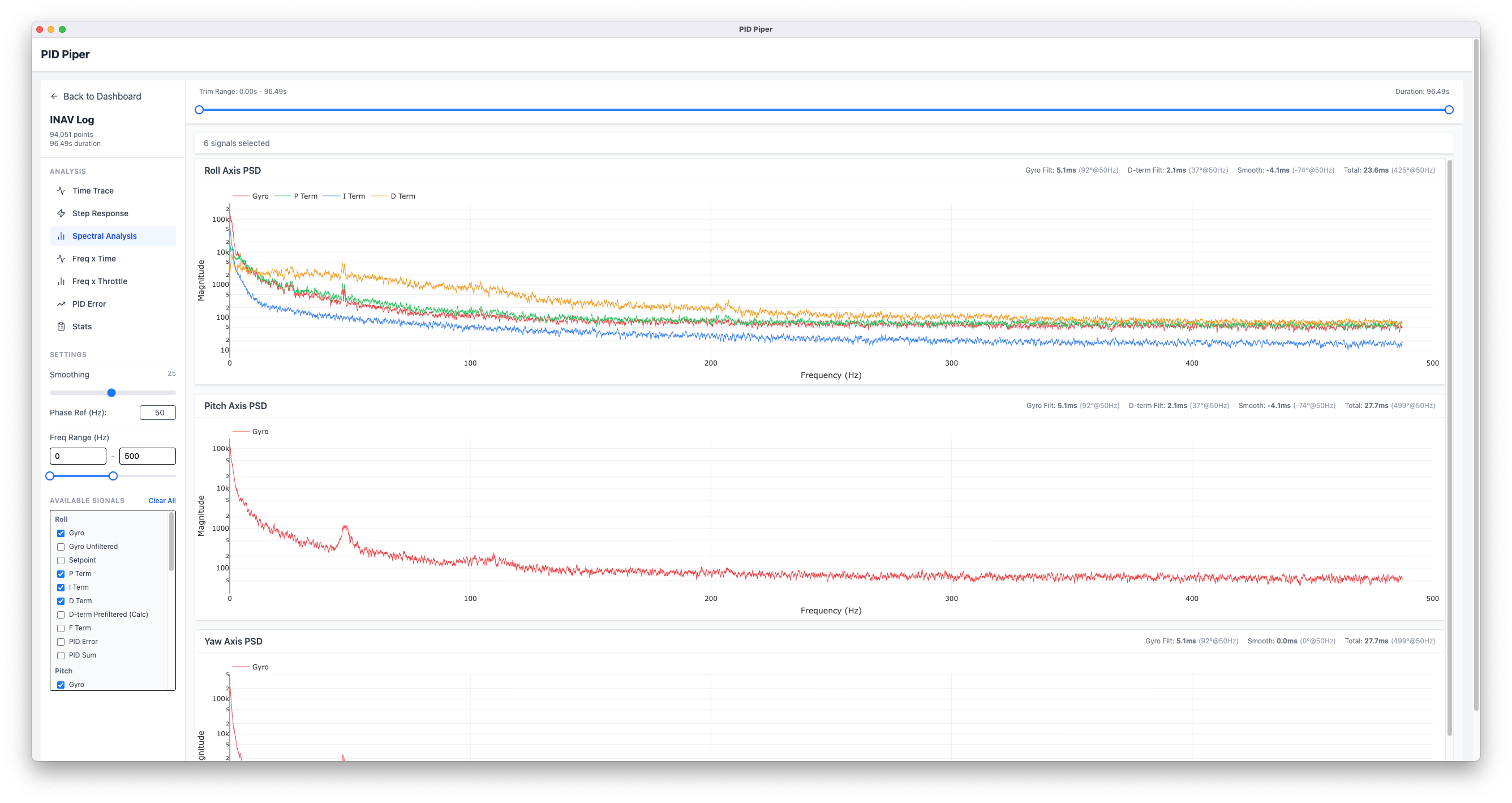
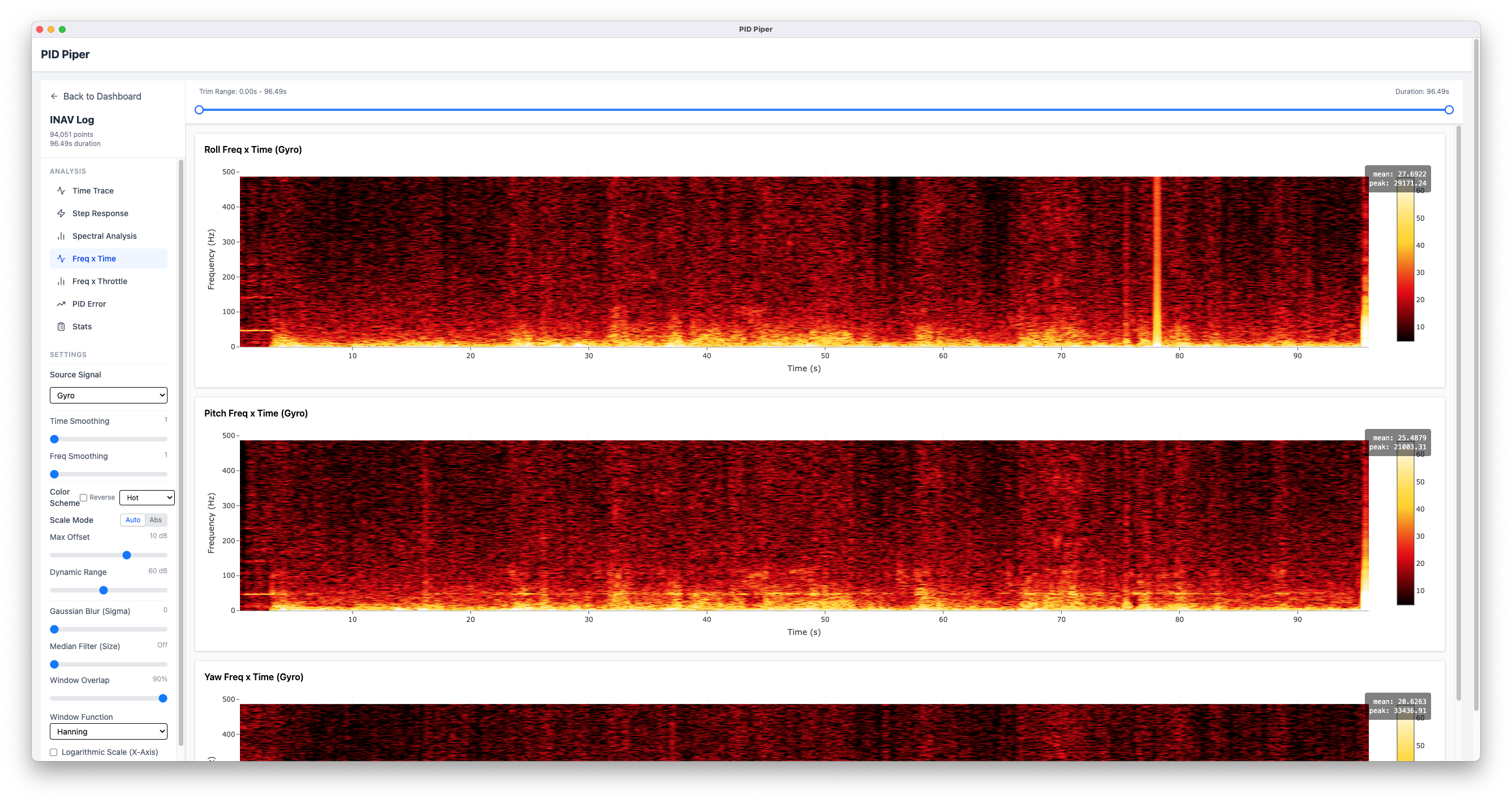
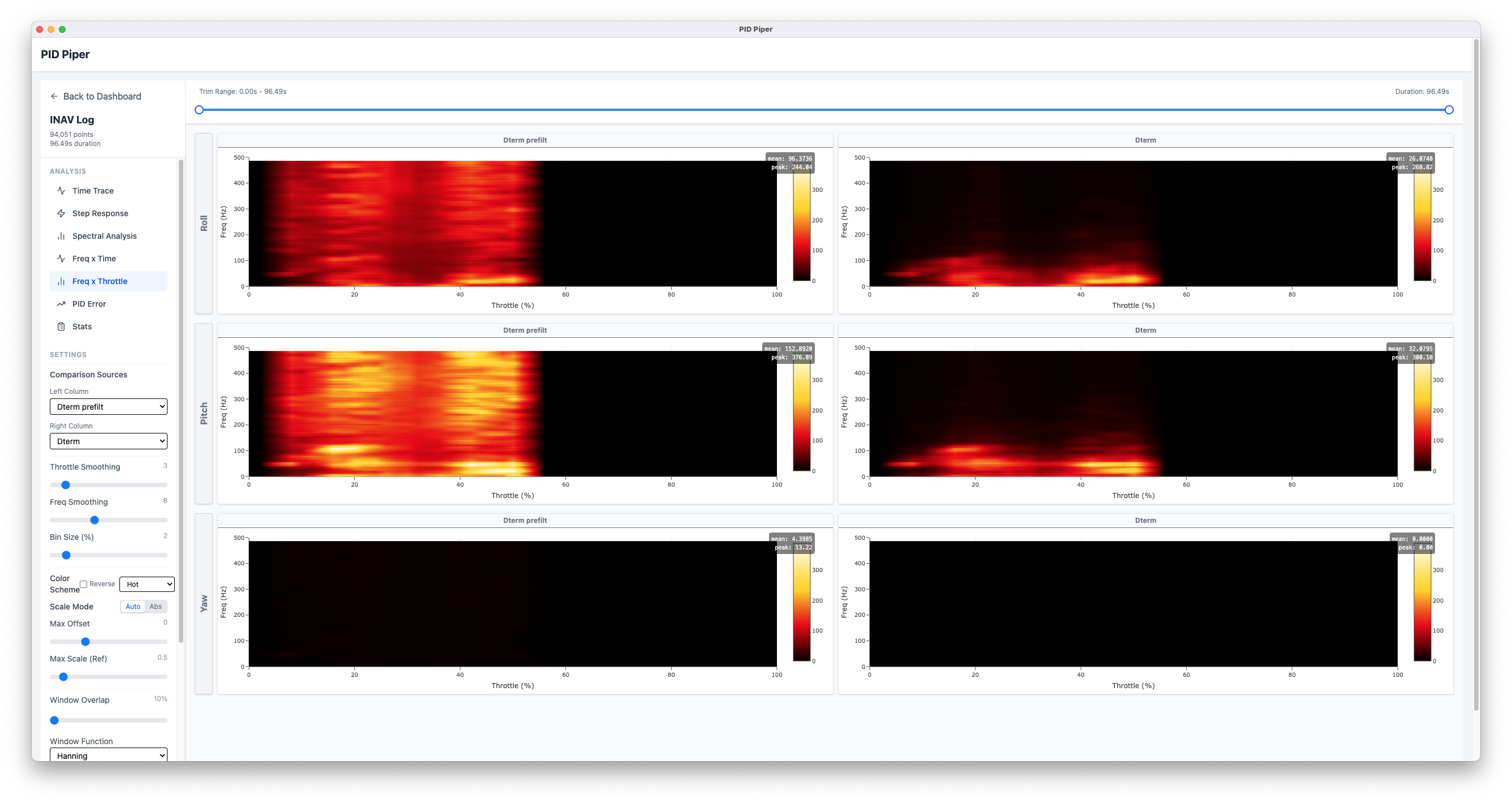
Visualize noise across frequencies.
Track resonance over time and per throttle %.
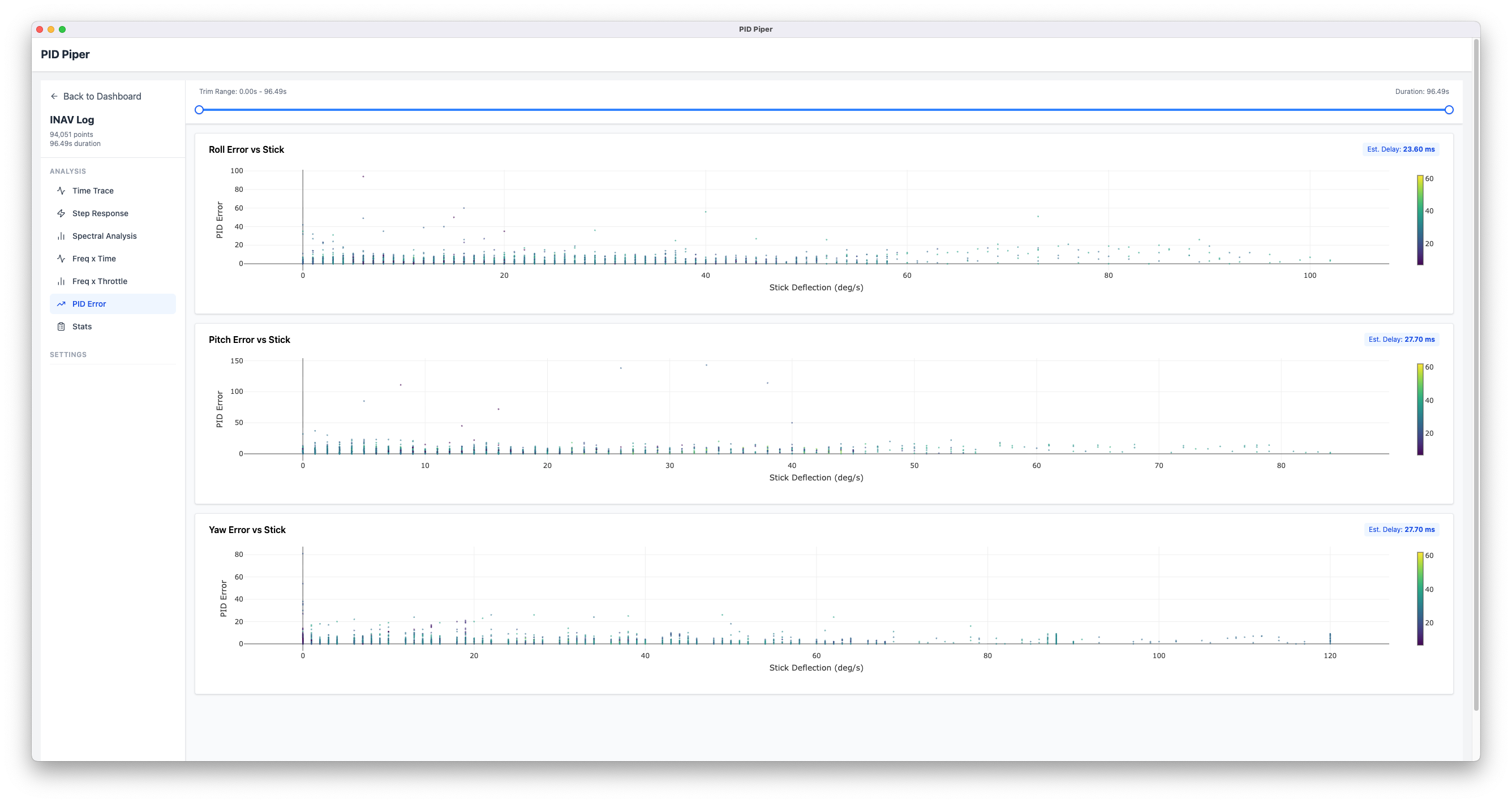
See how well the controller tracks setpoints in scatter plots.
{kind=link}
{kind=link}
G-force, vibration, battery, GPS at a glance.
PID Piper checks for updates in the background and installs them on next quit.
You can opt into the Beta channel in Settings → Updates to receive
pre-releases earlier.
Your log files never leave your computer. The app uses anonymous error and usage telemetry to help us fix bugs faster — see the Privacy Policy for full details. You can disable telemetry by blocking outbound traffic to the configured endpoints.
PID Piper is freeware for personal, non-commercial use. Commercial use
(including paid drone-tuning services) requires a separate license — see
LICENSE.md.
Please file issues on this repository (ishumilin/pid-piper) — the source
code lives in a separate private repository.
If PID Piper is useful to you and you want to keep it free for everyone, please consider sponsoring on GitHub or supporting via Buy Me a Coffee.