From 44 real labels to deployment-grade accuracy — Blender SDG + Two-Stage YOLO + Sim-to-Real Transfer
Independently replicating NVIDIA's SDG methodology with one non-obvious finding that changes deployability
Click to watch on YouTube — full pipeline walkthrough: Blender SDG → YOLO training → real-time webcam inference
Green = Box (YOLO1) · Blue = Stain · Yellow = Puncture (YOLO2)

IMG_9132 — Stain detection |

IMG_9133 — Puncture detection |

IMG_9134 — Clean box (zero false positive) |

IMG_9135 — Dual-defect scenario |
The pipeline generates three synchronized data streams from a single Blender scene.
Each GIF below cycles through 60 sampled frames from the full 6,000+ image dataset.
| Blender Render | Mask Pass | YOLO Annotation Overlay |
|---|---|---|
 |
 |
 |
| Cycles render — domain-randomized lighting, ground PBR, HDRI | Object mask pass — used for auto-labeling bounding boxes | Auto-generated YOLO label overlay via OpenCV contour |
| Real-Only (44 imgs) | + 4,000 Synthetic | Gain | |
|---|---|---|---|
| Val mAP50 | 0.69 | 0.89 | +0.20 |
| Defect Hit Rate | 71% | 93% | +22 pp |
| Clean Box FP | 23% | 0% | −23 pp |
| Stain Recall | 40% | 80% | ×2 |
The core insight is not "synthetic data is magic" — it's that synthetic data turns 50 prototyping images into deployment-grade performance, provided the negative anchor distribution is correct.

Standard SDG tutorials explain "synthetic pre-train + small real fine-tune." None explain which real samples matter. This project isolates the effect:
| Config | Train Composition | Clean Box FP |
|---|---|---|
| Hybrid v1 (failed) | 4,000 synthetic + 12 real positive | 76% ❌ |
| Hybrid v2 🏆 | 4,000 synthetic + 12 positive + 20 real clean negative anchor | 0% ✅ |
The delta is 20 real clean-box crops. Without them, the model's decision threshold collapses: it flags printing text and fold creases as defects. Adding positives without negatives makes this worse, not better.
Engineering rule: In hybrid SDG training, source your negatives before sourcing your positives.

Ultralytics YOLOv8's fitness function (0.1×mAP50 + 0.9×mAP50-95) combined with a small val set (30 images) and default patience logic can lock best.pt at epoch 1–2 — silently shipping a COCO-pretrained model with no domain learning.
| Scale | No HN backgrounds | + 22 HN empty backgrounds |
|---|---|---|
| 500-image train | best = epoch 1 🔒 | best = epoch 30 ✅ |
| 6,427-image train | best = epoch 2 🔒 | best = epoch 10 ✅ |
13× more data does not solve it. 22 hard-negative backgrounds (0.34% of dataset) do. Training distribution shape controls optimizer behavior more than volume.


When the SDG pipeline already applies Sim-to-Real augmentation (color shift, blur, JPEG compression, noise), stacking Ultralytics default augmentation (mosaic, HSV, random erasing) on top creates destructive over-perturbation for small defects like Puncture (circular holes < 30px):
| Aug Configuration | Val Puncture mAP50 | Multiplier |
|---|---|---|
| Both aug layers on (baseline) | 0.10 | 1.0× |
| Pipeline aug off (noaug) | 0.385 | 3.8× |
| Ultralytics aug off (noultaug) | 0.76 | 7.6× |
Most SDG tutorials omit this — but it determines whether your model escapes synthetic-only val overfitting.

The same Blender pipeline produces radically different sim-to-real transfer outcomes depending on the defect's visual signature:
| Target | Synthetic-Only Performance | Explanation |
|---|---|---|
| YOLO1 — Box localization | mAP50 ≈ 0.95+, test recall 94% | Large-scale geometry + flat texture; PBR shader closely matches reality |
| YOLO2 — Puncture (circular hole) | 100% hit rate | Sharp edge, concentrated feature; easy to express in shader |
| YOLO2 — Stain (translucent gradient) | Real-only 40%, synth-only 0%, hybrid 80% | Subtle translucency and diffuse gradients exceed PBR fidelity |
"Is synthetic data enough?" has no universal answer. It depends on whether the defect's visual feature is expressible by your shader. Audit your defect types before choosing pure-synthetic vs. hybrid strategy.

Held-out test set: 40 images (5 stain + 5 puncture + 4 both + 26 clean) — never seen in any training run.
| Experiment | Train Composition | Defect Hit | Clean FP | Verdict |
|---|---|---|---|---|
| realonly_fair | 0 synthetic + 44 real | 71% | 23% | Prototype-viable, high FP |
| noaug | 4,000 synth (no pipeline aug) | 0% | 0% | Double aug → val overfit |
| noultaug | 4,000 synth (no YOLO aug) | 86% | 8% | ✅ Best pure-synthetic baseline |
| hybrid v1 | 4,000 + 12 real positive | 100% | 62% | ❌ FP explosion; undeployable |
| hybrid_v2 🏆 | 4,000 + 12 positive + 20 anchor | 93% | 0% | ✅ Only deployment-ready config |

Note on Confusion Matrix vs. deployment conf: Ultralytics confusion matrix uses conf ≈ 0.001 for PR/F1 curve coverage; it does not reflect deployed FP rate. The "Clean FP" column above is empirical:
11_predict_yolo2.py --conf 0.40on the 40-image test set.



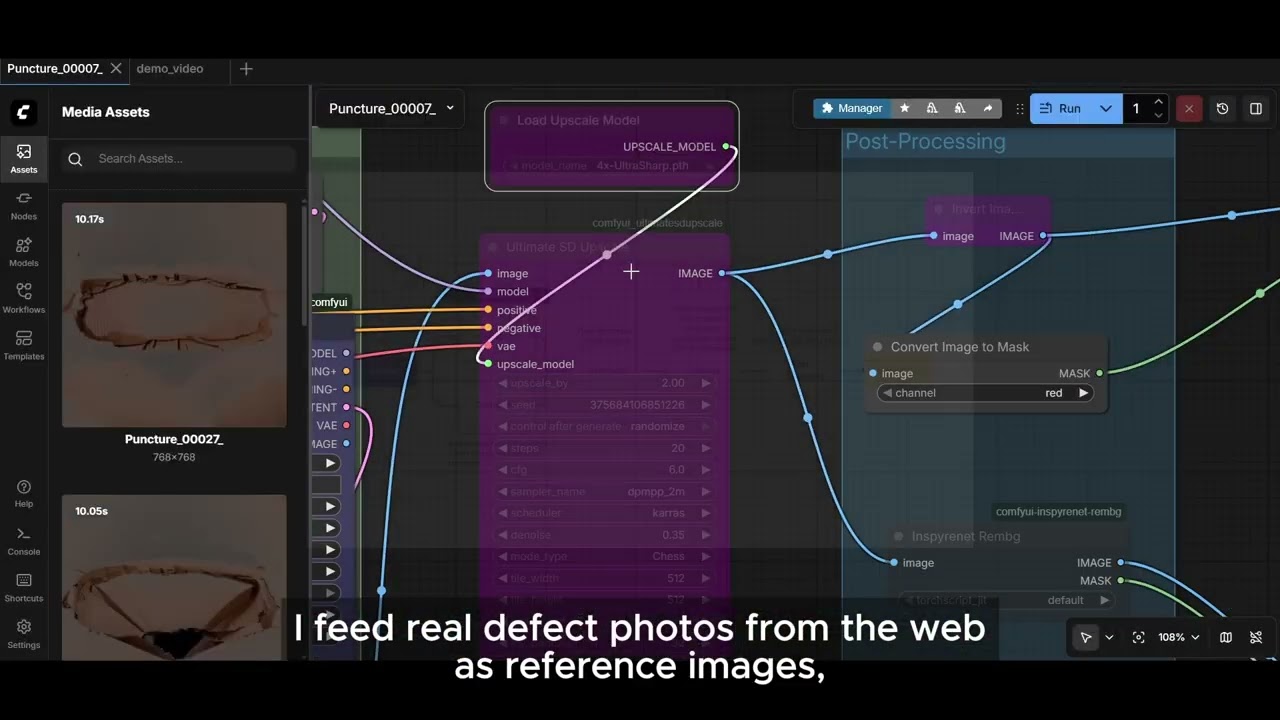
| Pipeline Overview | Blender SDG Workflow | ComfyUI Stain Shader |
|---|---|---|
 |
 |
 |
Webcam frame (640×480)
│
▼
YOLO1 (production_v2_HN/best.pt)
└─ Locates box BBox [class 0, conf ≥ 0.50]
│
▼ tight crop (0% padding) → resize 640×640
YOLO2 (production_v1_hybrid_v2/best.pt)
└─ Detects Stain / Puncture [conf ≥ 0.40]
│
▼
Overlay: Green = Box · Blue = Stain · Yellow = Puncture
Critical design: training ROI and inference ROI are strictly mirrored (same crop padding, same resize) — eliminating train/inference domain gap.
Note — This repository is a research showcase for Synthetic Data Generation (SDG). The Blender scene file (
03_Blender_Project/*.blend, ~158 MB) is not version-controlled. Running the full pipeline from scratch requires you to supply your own Blender scene and update the object names, material slot references, and file paths in02_blender_render.pyto match your scene setup. The inference scripts (09–12) and pre-trained weights work independently without Blender.
- Python 3.11 / Windows 11
- NVIDIA RTX 4050 Laptop (6 GB VRAM) / CUDA 12.1
- Blender 4.x / Ultralytics 8.4.38
# 1. Activate venv
.\venv\Scripts\Activate.ps1
# 2. Generate synthetic data (~5,900 Blender renders, ~6 hours)
python 02_Scripts\03_render_operator.py
# 3. Generate YOLO1 / YOLO2 labels
python 02_Scripts\04_annotator_yolo1.py
python 02_Scripts\05_cropper_yolo2.py
# 4. Train (YOLO1: ~30 min / YOLO2: ~10 min)
python 02_Scripts\08_train.py --target yolo1 --patience 20
python 02_Scripts\08_train.py --target yolo2 --patience 20 --no-yolo-aug
# 5. Real-time webcam demo
python 02_Scripts\11_realtime_demo.pypython 02_Scripts\11_realtime_demo.py
# Auto-loads:
# YOLO1 = production_v2_HN/best.pt (94% test recall)
# YOLO2 = production_v1_hybrid_v2/best.pt (93% defect hit, 0% FP)
# Q to quit · S to screenshotpython 02_Scripts\11b_predict_video.py --input path/to/video.mp4CardboardBox_detect/
├── 01_Assets/ # PBR ground materials / HDRI / decals / real reference photos
├── 02_Scripts/ # Pipeline + training / inference scripts (00–12)
├── 03_Blender_Project/ # Blender master scene (not version-controlled; .blend excluded)
├── 04_Dataset_YOLO1/ # Box-detection dataset ← generated by pipeline, not on GitHub
├── 05_Dataset_YOLO2/ # Defect-detection dataset ← generated by pipeline, not on GitHub
├── 06_Raw_Output/ # Blender renders + QA / predict results ← generated, not on GitHub
├── 07_Models/ # Trained weights (3 best.pt published; others gitignored)
└── 08_records/ # Charts / logs
└── charts/ # Publication-ready figures + GIFs
Note:
04_,05_,06_are pipeline outputs and are.gitignored. Run scripts03 → 04 → 05in order to regenerate them (requires Blender scene — see Quickstart).
Full experiment log: CLAUDE.md — 10 ablation groups + P001–P014 engineering incident records.
| Dimension | NVIDIA Reference | This Project |
|---|---|---|
| Synthetic images | 1,500 | 4,000 |
| Real images | 50 | 44 |
| Real data ratio | 3.3% | 1.1% |
| Strategy | Two-stage fine-tune (pretrain → freeze + low-LR FT) | Single-stage hybrid + ablation-controlled fine-tune |
| Key result | Synthetic pre-training rescues pure-real failure | Same conclusion + real negative anchor as secondary deployability switch |
This project independently replicates NVIDIA's methodology and adds the negative-anchor finding not covered in NVIDIA's published guidance.
Reference: Dataset numbers (1,500 synthetic / 50 real) and methodology sourced from Docca & Torculas (2023) — NVIDIA Developer Blog — and the companion YouTube demo. See Citations section for full references.
This is a 3-month solo side project with AI coding assistance. The findings are point estimates from a single hardware setup, and the pipeline is currently designed around cardboard boxes specifically.
| # | Limitation | Impact |
|---|---|---|
| L1 | Val set = 30 images; statistically unstable | mAP is sensitive to individual image changes |
| L2 | Test set size varies across experiments (72 / 84 / 40) | Mitigated via 40-image intersection for apple-to-apple comparison |
| L3 | No cross-camera / cross-box-type domain validation | Performance on a different webcam is unknown |
| L4 | Single architecture (YOLOv8n); v8s / v8m not tested | Conclusions may be model-scale-sensitive |
| L5 | Augmentation parameters are heuristic; no grid search | 0.89 mAP50 is likely not the ceiling |
| L6 | Low object replicability — switching to a different object (screws, teddy bears, shoes, etc.) requires redesigning the physical and mathematical rendering rules in scripts 01–03 | Pipeline is not plug-and-play for new products |
Immediate: YOLO1 Production Tuning
The current YOLO1 model (94% test recall) is near production-ready. Next step is extended real-world stress testing across varied lighting and camera angles before combining with YOLO2 for end-to-end field deployment.
Generative AI for Sim-to-Real Gap Closure
Blender-based SDG was chosen for its full geometric controllability — every coordinate, camera angle, and defect position is programmatically determined, enabling automated annotation at scale. However, Blender's PBR shader has a ceiling: subtle optical effects like translucent stain gradients create a sim-to-real gap that purely physics-based rendering cannot bridge (see Finding 4).
The next research phase will explore using generative AI (diffusion models / image-to-image translation) to post-process Blender outputs and reduce the visual domain gap — treating the synthetic dataset as a structured starting point for generative augmentation rather than a final output. The goal is to preserve the geometric labeling accuracy of SDG while gaining the photorealistic texture fidelity of learned priors.
Scaling to NVIDIA Omniverse Replicator + Cosmos
This project deliberately reimplemented NVIDIA's SDG methodology in Blender to understand the pipeline from first principles (see Alignment with NVIDIA SDG Methodology). The natural production-grade upgrade path is NVIDIA's own two-stage stack, which maps almost one-to-one onto the structured-render → generative-augment direction above:
| Current (Blender) | NVIDIA Upgrade Path | What It Buys |
|---|---|---|
| Custom orchestrator + Cycles render | Omniverse Replicator | Native domain randomization API, USD-based scenes, ground-truth annotation at scale, RTX-accelerated throughput |
| Diffusion post-processing (planned) | NVIDIA Cosmos (Cosmos Transfer world foundation models) | Conditions on the structured render's segmentation / depth / edge maps to synthesize photorealistic, physically-grounded variations — closing the sim-to-real gap while preserving the exact labels |
Concretely, the target workflow is: Omniverse Replicator generates the controllable, perfectly-labeled 3D ground truth → Cosmos Transfer amplifies each frame into diverse, photoreal samples conditioned on those structured maps. This is precisely NVIDIA's recommended physical-AI data flywheel, and it directly addresses Finding 4 — the translucent-stain shader ceiling — by replacing hand-tuned PBR fidelity with a learned world prior, without sacrificing the automated annotation that makes SDG viable. Replicator also removes the current pipeline's biggest limitation (L6, low object replicability): swapping in a new product becomes a USD asset change rather than a rewrite of the geometric rendering rules.
Structured Sim-to-Real Evaluation
Formally measure domain gap per defect class under controlled lighting and camera changes, to build a transferability map for future SDG pipeline decisions.
| Category | Tools |
|---|---|
| 3D Rendering | Blender 4.x (Cycles, OptiX) |
| Scene Randomization | Custom orchestrator + render operator |
| Domain Randomization | 20 HDRI environments + 29 PBR ground materials + projected decal variation |
| Sim-to-Real Augmentation | OpenCV (cool color shift + contrast + blur + JPEG + noise) |
| Model | YOLOv8n (Ultralytics 8.4.38) |
| Deployment | OpenCV webcam + dual-model real-time inference |
- Docca, A., & Torculas, M. (2023, April 19). How to Train a Defect Detection Model Using Synthetic Data with NVIDIA Omniverse Replicator. NVIDIA Developer Blog. ← primary reference for the NVIDIA SDG methodology comparison
- NVIDIA Omniverse. (2023). Defect Detection Model Trained on Synthetic Data w/ Omniverse Code, Adobe Substance 3D, and Roboflow [Video]. YouTube. ← companion demo video; dataset numbers (1,500 synthetic / 50 real) cited from here
- NVIDIA. (2025). Cosmos World Foundation Models for Physical AI. ← referenced in Future Work as the generative-augmentation upgrade path
- NVIDIA. Omniverse Replicator — Synthetic Data Generation. ← referenced in Future Work as the production-grade SDG upgrade path
- Ultralytics YOLOv8
- Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., & Abbeel, P. (2017). "Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World." IROS 2017
- Ghiasi, G., Cui, Y., Srinivas, A., Qian, R., Lin, T.Y., Cubuk, E.D., Le, Q.V., & Zoph, B. (2021). "Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation." CVPR 2021
- Boikov, A., Payor, V., Savelev, R., & Kolesnikov, A. (2021). "Synthetic Data Generation for Steel Defect Detection and Classification Using Deep Learning." Symmetry, 13(7), 1176
bbKurt11 — Sim-to-Real Computer Vision Research (2026)
This project demonstrates a complete engineering pipeline from synthetic data generation → domain randomization → sim-to-real transfer, validated across 9 YOLO2 ablations × 4 YOLO1 ablations, yielding four non-obvious engineering findings.
💼 [LinkedIn]https://www.linkedin.com/in/kurt-du-708145401
The cardboard box used in this project belongs to a commercial diaper brand. This project is a personal, non-commercial research side project. It is not affiliated with, endorsed by, or associated with any brand or company in any way. The box was used solely as a physical object for computer vision research purposes. No brand identity, trademark, or proprietary information is intentionally reproduced or exploited.