Algorithm Overview.zh CN
DCReg 的核心由三个模块组成。
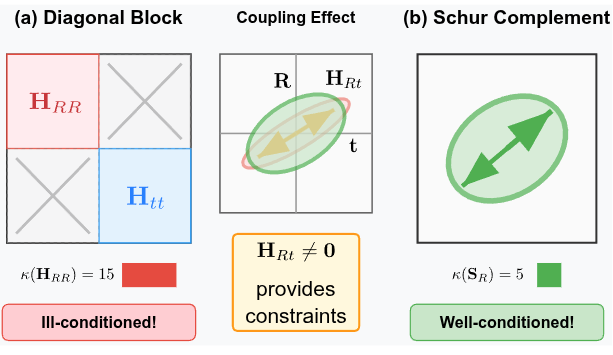
从 ICP 法方程 H = J^T J 出发,DCReg 分别构造旋转和平移的 Schur 补:
S_R = H_RR - H_Rt H_tt^{-1} H_tRS_t = H_tt - H_tR H_RR^{-1} H_tR
这样可以去掉耦合项对可观测性分析的遮蔽作用,直接在解耦子空间中分析谱信息。
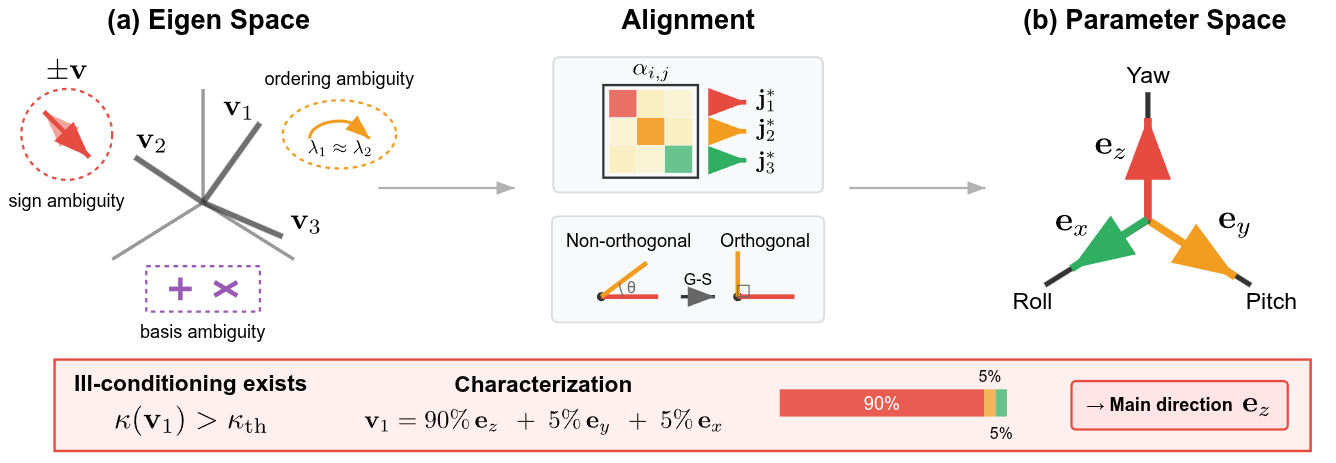
然后把原始 Schur 特征向量映射到物理运动轴:
- 旋转:
roll / pitch / yaw - 平移:
x / y / z
这一阶段会输出:
- 原始 Schur 特征值
- 对齐到物理轴后的特征值
- 退化掩码
- 各轴贡献比例
- 用于预条件器的钳制后特征值
| Schur 检测 | 物理轴表征 |
|---|---|
 |
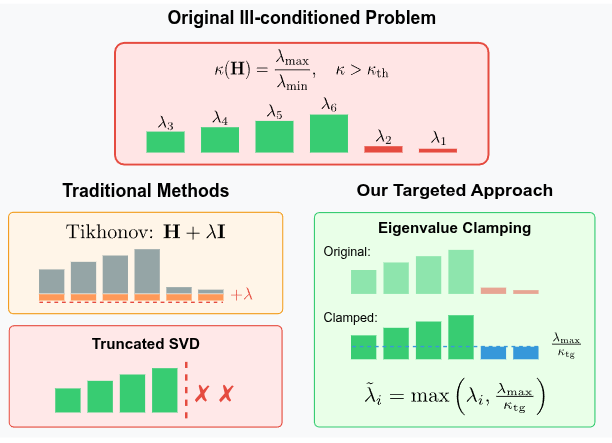 |
DCReg 只对弱方向做谱钳制,构造块对角预条件器,再用 PCG 求解法方程。这样可以稳定退化方向,而不会把强观测方向一并过度正则化。